

科技不断进步,双足机器人备受关注。但一旦出现意外,这些复杂机器常常“摔得不体面”。轻微的推撞或小障碍,都可能让机器人猛然倒下,伤及摄像头等敏感部件。为此,迪士尼瑞士研究团队带来一套新系统,让机器人在跌倒时也能安全、从容地着陆。

目前常见的防跌策略并不理想。有的机器人在跌倒时关节过于僵硬,导致“硬着陆”;有的则因为关节太松,摔倒过程变得杂乱。有些方案依赖预设的跌倒动作,但往往只适用于慢速运动或简单场景。
在最新论文中,迪士尼研究团队介绍了如何用强化学习训练机器人实现柔和、安全的跌倒。他们在仿真环境中让成千上万个虚拟机器人反复练习,覆盖不同的跌倒角度与姿势。每次机器人成功减小冲击力,或以指定的优雅姿态落地,系统都会给予奖励。通过这样的持续反馈,机器人逐步掌握应对各类跌倒情形的技巧。
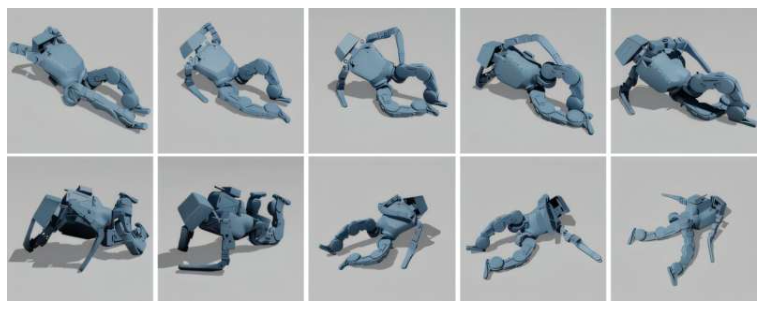
最终,团队将该策略应用到真实的双足机器人上,并选定了十种由艺术家设计的优雅着陆姿势。经过多轮跌倒测试,机器人不仅毫发无损,功能完好,还能稳定地以预设姿势落地。
接下来,迪士尼团队计划把这套 AI 策略拓展到不同类型的机器人,验证其通用性。他们也希望研发出让机器人在跌倒前进行预测的能力,并在跌倒后从容优雅地重新站起。
划重点:
🔍 利用强化学习训练机器人,实现柔和、安全的“优雅跌倒”。
🤖 多次实测后,机器人按预设姿势着陆,未出现损坏。
🛠️ 下一步将推广到更多机器人类型,并探索跌倒预测与优雅起身能力。

© 版权声明
AI智能体所有文章,如无特殊说明或标注,均为本站作者原创发布。任何个人或组织,在未征得作者同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若此作者内容侵犯了原著者的合法权益,可联系客服处理。
THE END
















用户38505528 9个月前0
粘贴不了啊用户12648782 10个月前0
用法杂不对呢?yfarer 10个月前0
草稿id无法下载,是什么问题?