

近日,国地中心携手纬钛机器人推出了全球首个、也是目前规模最大、模态最齐全的跨本体视触觉多模态机器人操作数据集:

在细节方面,数据集采用支持 640×480 分辨率与 120Hz 刷新率的高性能传感器,能够精确记录物体接触时的细微变化。目前已收集约 9072 万对真实接触样本,重点面向家居、餐饮、工业与特种作业四大场景中的 260+ 个高接触任务。
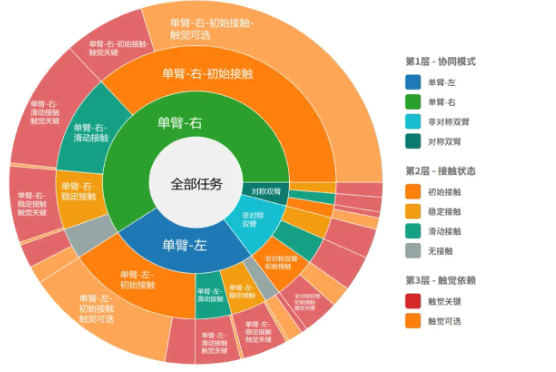
测试结果表明,引入视触觉感知后,约七成任务获得更连贯的接触状态表征。这为机器人的精细化操作、精准力控,以及在任务失败后的自我恢复提供了关键的底层数据保障。

© 版权声明
AI智能体所有文章,如无特殊说明或标注,均为本站作者原创发布。任何个人或组织,在未征得作者同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若此作者内容侵犯了原著者的合法权益,可联系客服处理。
THE END
















用户38505528 9个月前0
粘贴不了啊用户12648782 10个月前0
用法杂不对呢?yfarer 10个月前0
草稿id无法下载,是什么问题?