

近日,AI机器人初创公司Generalist正式发布其里程碑级基础模型——GEN-0,并首次公布机器人领域的缩放规律(Scaling Laws),宣告机器人技术正从“按任务定制”迈向“通用智能”的新阶段。该模型在超过27万小时的真实世界操作数据上训练,首次展现跨不同硬件平台的“边想边做”能力,被业内不少人称作机器人的“ChatGPT时刻”。

27万小时真实数据:不靠仿真,直面复杂现实
不同于依赖仿真环境或纯视频演示的方案,GEN-0直接以高保真物理交互数据进行训练。这些数据来自全球数千个家庭、仓库和工作场所的真实场景,覆盖剥土豆、拧螺丝、开包装、组装套件等数百种灵巧操作,每周还会新增超1万小时。对“现实中的混乱与扰动”的极致捕捉,让模型具备了更强的泛化能力——它学会的不是理想条件下的动作,而是如何在滑动、遮挡、光照变化等干扰中可靠完成任务。
7B参数成为能力“跃迁”的关键点
Generalist的核心贡献在于首次量化机器人智能的缩放规律:下游任务误差与预训练数据规模呈幂律关系(L(D) ∝ D^-0.5)。更进一步的发现是,70亿参数是能力跃迁的临界阈值。低于该规模,模型容易在海量数据里“固化”,迁移能力受限;一旦越过这个点,泛化表现会显著提升。这为行业指明了路线:持续扩大真实交互数据,就能系统性增强机器人智能。
Harmonic Reasoning架构:首次实现“边想边做”
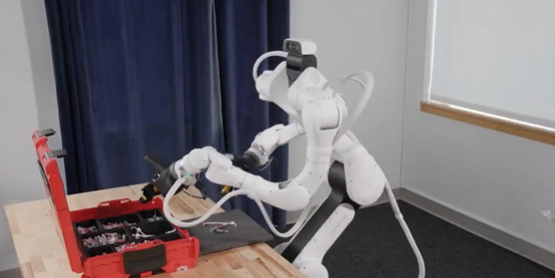
GEN-0的关键创新是Harmonic Reasoning(谐波推理)架构,解决了机器人“先想后做”的割裂问题。它采用异步的连续时间流,让感知、推理与动作在同一时序里协同推进。在演示中,机器人自主完成“相机套件组装”的全流程——折叠托盘、取物、开袋、摆放、封装、清理——全程无需人工指令,动作自然流畅,给人以“类人直觉”的观感。
跨平台通用:一套模型覆盖多种机器人形态
GEN-0遵循“跨具身”设计原则,同一模型即可无缝部署在6自由度机械臂、7自由度机械臂,甚至16+自由度的半人形机器人上,无需为不同硬件另行训练策略。企业因此可以搭建统一的智能中枢,管理多样化机器人终端,显著降低部署与维护成本。
数据飞轮加速,通用机器人更近一步
Generalist依托其全球部署网络,构建“数据—智能”飞轮:更多机器人带来更多真实交互数据,推动模型迭代升级,再反过来提升新机器人的能力。这种路径有望终结当前“一任务一模型”的零散生态,让机器人从专用工具进化为可自主学习的通用伙伴。
当然,挑战仍在——数据隐私、算力支出与安全验证需要持续完善。但不可否认,GEN-0的到来,意味着具身智能进入“可预测、可扩展、可规模化”的新阶段。当机器人也能像大语言模型一样,从大量经验中自我反思与成长,科幻中的智能体正在走向现实。而这场变革,才刚刚开始。














用户38505528 1个月前0
粘贴不了啊用户12648782 2个月前0
用法杂不对呢?yfarer 2个月前0
草稿id无法下载,是什么问题?