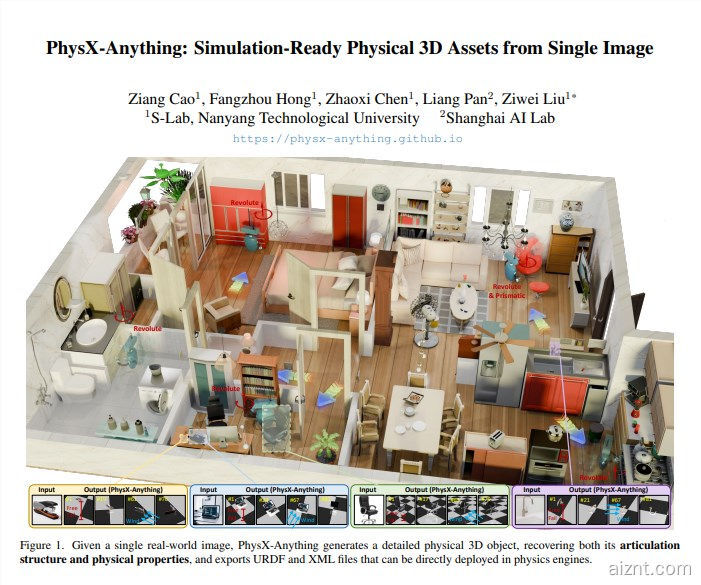


南洋理工大学与上海人工智能实验室联合推出开源框架 PhysX-Anything,只需一张 RGB 图片即可生成包含几何、关节和物理属性的完整 3D 资产,可直接导入 MuJoCo、Isaac Sim,用于机器人策略训练。

技术亮点
1. 由粗到细的流程:先整体预测物理属性(质量、质心、摩擦系数),再到部件层面细化几何与关节极限角度,避免只看视觉导致的物理不准。
2. 新型压缩 3D 表示:将面片、关节轴与物理参数压入 8K 维隐向量,推理时一次性解码,生成速度比当前 SOTA 快约 2.3 倍。
3. 显式物理监督:数据集中加入 12 万条真实物理测量,训练中引入质心、惯性矩与碰撞盒损失,确保仿真更一致。
实测结果
在 Geometry-Chamfer 和 Physics-Error 两项指标上,PhysX-Anything 分别降低 18% 与 27%;绝对尺度误差 < 2 cm,关节活动范围误差 < 5°,明显优于 ObjPhy、PhySG 等最新方法。真实场景测试(宜家家具、厨房用品)中,将生成资产导入 Isaac Sim 后,机器人抓取成功率提升 12%,训练步数减少 30%。
开源与影响
项目已在 GitHub 发布,权重、数据与评测基准同步开放;团队计划在 2026Q1 推出支持「视频输入」的 V2 版本,可预测可动部件的时序轨迹,助力动态场景的策略学习。
论文:https://arxiv.org/pdf/2511.13648

© 版权声明
AI智能体所有文章,如无特殊说明或标注,均为本站作者原创发布。任何个人或组织,在未征得作者同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若此作者内容侵犯了原著者的合法权益,可联系客服处理。
THE END
















用户38505528 9个月前0
粘贴不了啊用户12648782 10个月前0
用法杂不对呢?yfarer 10个月前0
草稿id无法下载,是什么问题?