

具身智能赛道迎来具有里程碑意义的突破。高德今日宣布,面向全球全量开源首个基于统一架构的机器人具身操作底座模型 ABot-M0。该模型的核心目标是实现“一个通用大脑可适配多种形态的机器人”,致力于跨越异构硬件之间的壁垒,推动具身智能从实验室加速走向工业与家庭场景。
核心技术与性能表现
ABot-M0在多项行业权威基准中展现出亮眼表现。数据显示,该模型在 Libero-Plus 基准上的任务成功率达到 80.5%,相较此前行业标杆方案 Pi0 提升了近 30%。此外,它在 Libero 与 RoboCasa 等评测中同样刷新了 SOTA(业内最顶尖)纪录。

三大维度的全量开源
为破解具身智能领域长期存在的“数据孤岛”和“部署难”问题,此次开源覆盖数据、算法与预训练模型三大方向:
-
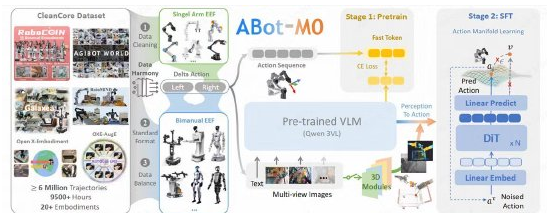
数据层面: 开放目前规模最大的通用机器人数据集 UniACT。数据集汇聚超过 600万条 真实操作轨迹,并配套提供从异构数据到标准化训练数据的完整处理流水线。
-
算法层面: 同步公开模型架构与训练框架,亮点包括高德自研的 动作流形学习(AML)算法 与 双流感知架构,显著增强机器人的空间理解与动作执行能力。
-
模型层面: 提供端到端预训练模型与完整工具链。开发者可“开箱即用”,无需从零搭建,极大降低在工业协作或家庭服务机器人上的适配门槛。
行业影响
高德 ABot-M0 技术负责人表示,通用具身智能的成长离不开全球开发者的共同参与。此次开源不仅是技术共享,更希望搭起连接学术研究与产业应用的桥梁,让不同形态的机器人都能拥有聪明、可靠且通用的“大脑”。

© 版权声明
AI智能体所有文章,如无特殊说明或标注,均为本站作者原创发布。任何个人或组织,在未征得作者同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若此作者内容侵犯了原著者的合法权益,可联系客服处理。
THE END
















用户38505528 10个月前0
粘贴不了啊用户12648782 11个月前0
用法杂不对呢?yfarer 11个月前0
草稿id无法下载,是什么问题?